.svg)
ROBIN VERMEULEN
i designed
the eFunCar, an all-electric vehicle, aimed at short-distance downtown commuting.
year
role
2013
Visual Concepting, Design Sketching, Tablet Drawing
In 2013, we barely new of the existence of Tesla. The Toyota Prius was the somewhat dull embodiment of electric cars. In this timeframe, the eFunCar was developed; an all-electric city dweller, aimed at short-distance downtown commuting. With this description, I got the opportunity to design the functional and aesthetic features of this car.
In this assignment I focused on visualising the future of electric driving.
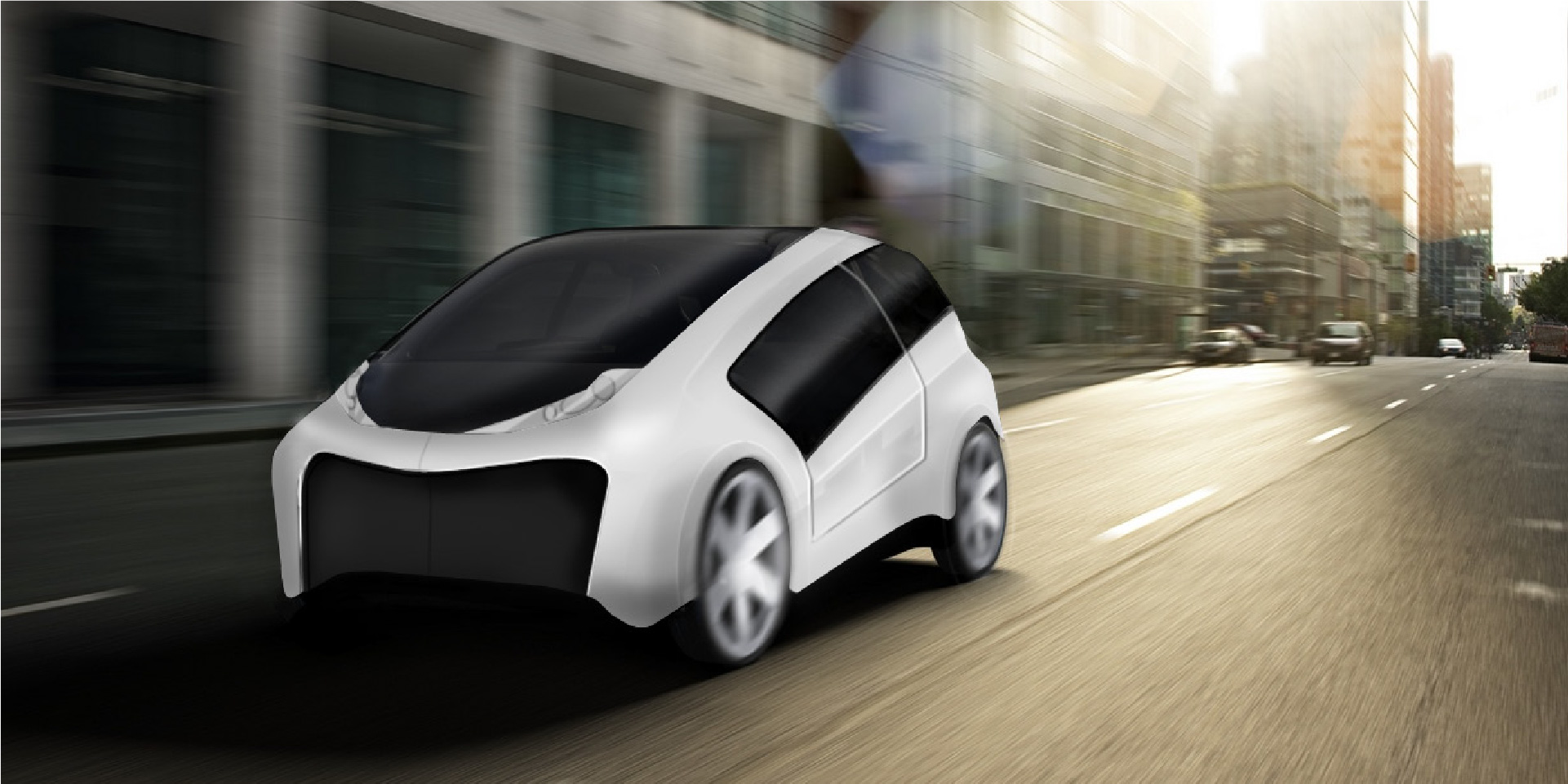
My development process focused on easy manoeuvring in big cities. A small wheelbase with limited overhang on both the front and back were the starting point. A small turning circle and easy parking are the result.
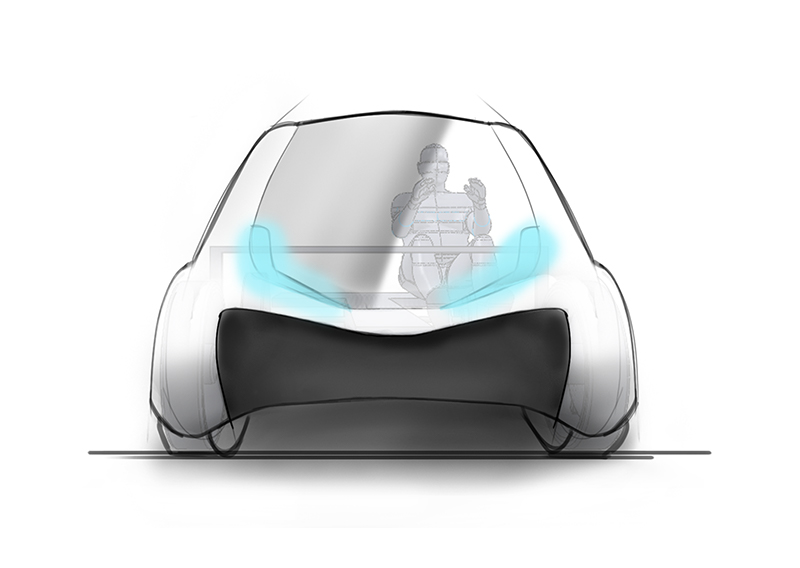
Scissor doors minimise the required space around the car for getting in and out. The lack of need for grilles for cooling enable use of a panorama roof stretching from the front nose all the way to the back of the car. In combination with big side windows, this roof maximises vision.
-800x533-2.jpg)
-800x533.jpg)


© 2020, Robin Vermeulen. Designed and coded with Macaw